Robo soudeur robotik Hwashi 6 aks soudeur pinch robo soudeur endistriyèl bra
Robo soudeur robotik Hwashi 6 aks soudeur pinch robo soudeur endistriyèl bra
Kategori Prensipal
Bra robo endistriyèl / Bra robo kolaboratif / Grip elektrik / Aktuatè entelijan / Solisyon automatisation
Aplikasyon
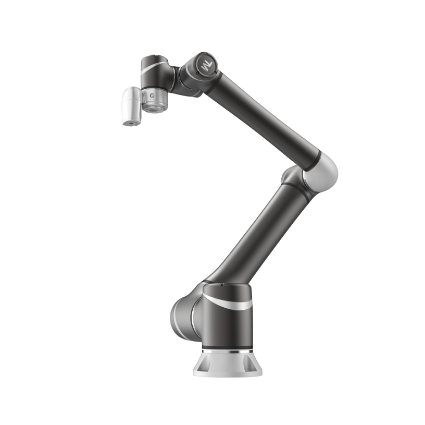
TM12 la gen pi gwo longè atenn nan seri robo nou yo, sa ki pèmèt operasyon kolaboratif, menm nan aplikasyon ki mande presizyon ak kapasite leve nan nivo endistriyèl. Li gen yon kantite karakteristik ki pèmèt li itilize san danje toupre travayè imen, epi san nesesite pou enstale baryè oswa kloti ankonbran. TM12 se yon ekselan chwa pou automatisation kobot pou amelyore fleksibilite, epi ogmante...pwodiktivite.
Avèk yon sistèm vizyon ki pi avanse nan klas li, teknoloji IA avanse, sekirite konplè, ak operasyon fasil,IA Cobot pral mennen biznis ou pi lwen pase tout tan.Mennen automatisation nan yon lòt nivo lè w ogmante pwodiktivite, amelyore kalite, epi diminye depans.
Prezantasyon Robo Endistriyèl Sis Aks pou Endistri Otomatizasyon Lachin nan, yon solisyon revolisyonè ki fèt pou transfòme endistri fabrikasyon an. Bra robotik pèfòmans segondè sa a konbine teknoloji dènye kri ak jeni presizyon pou bay efikasite ak pwodiktivite san parèy.
Bra robotik yo fèt pou satisfè bezwen yon pakèt endistri tankou otomobil, elektwonik ak famasetik. Karakteristik avanse li yo fè li ideyal pou travay lou ak delika. Kit se leve materyèl lou oswa rasanble pyès konplèks, bra robotik sa a ka jere li fasilman.
Bra robotik la konfigire nan yon konfigirasyon 6 aks, sa ki bay yon fleksibilite ak yon ajilite enkwayab. Sis jwenti diferan li yo pèmèt mouvman presi, sa ki pèmèt li fè travay konplèks avèk maksimòm presizyon. Soti nan soude rive nan manyen materyèl, posiblite yo san limit ak machin versatile sa a.
Youn nan prensipal avantaj bra robotik otonòm sa a se entegrasyon san pwoblèm li ak sistèm automatisation yo. Li ka fasil pou pwograme pou travay an senkronizasyon ak lòt machin yo, sa ki optimize tout pwosesis pwodiksyon an. Avèk vitès ak presizyon siperyè li, li ka diminye tan ak depans pwodiksyon yo anpil, kidonk ogmante rentabilité biznis la.
Sekirite se toujou yon pi gwo priyorite lè n ap pale de automatisation endistriyèl. Robo endistriyèl sis aks nan endistri automatisation Lachin nan ekipe ak karakteristik sekirite avanse pou asire yon anviwònman travay ki an sekirite. Soti nan bouton arè ijans lan rive nan sistèm anti-kolizyon an, chak aspè te fèt ak anpil atansyon pou minimize risk epi pwoteje operatè a ak machin nan.
Anplis pèfòmans ekselan li yo, bra robotik la gen yon koòdone fasil pou itilize pou operasyon ak pwogramasyon fasil. Kontwòl entwisyon li yo ak konsepsyon ergonomik li yo pèmèt operatè tout nivo konpetans itilize li san fòmasyon konsiderab.
An rezime, robo endistriyèl sis aks China Automation Industry la chanje tout bagay nan domèn automatisation an. Avèk fonksyonalite avanse li yo, fleksibilite li yo ak karakteristik sekirite li yo, li pèmèt biznis yo ogmante pwodiktivite epi senplifye operasyon yo. Anbrase lavni fabrikasyon an ak bra robotik dènye kri sa a epi debloke vrè potansyèl endistri ou a.
Karakteristik
ENTELIJAN
Pwoteje Cobot ou a pou lavni ak entèlijans atifisyèl
• Enspeksyon optik otomatik (AOI)
• Asirans kalite ak konsistans
• Ogmante efikasite pwodiksyon an
• Redui depans fonksyònman yo
SENP
Pa gen eksperyans obligatwa
• Entèfas grafik pou pwogramasyon fasil
• Pwosesis koreksyon ki oryante sou pwosesis
• Gid senp ak men pou ansèyman pozisyon
• Kalibrasyon vizyèl rapid ak tablo kalibrasyon an
AN SEKIRITE
Sekirite kolaboratif se priyorite nou
• Konfòm ak ISO 10218-1:2011 ak ISO/TS 15066:2016
• Deteksyon kolizyon ak arè ijans
• Ekonomize pri ak espas pou baryè ak kloti
• Mete limit vitès nan yon espas travay kolaboratif
Kobot ki mache ak IA yo rekonèt prezans ak oryantasyon anviwònman yo ak pyès yo pou fè enspeksyon vizyèl ak travay dinamik "pick-and-place". Aplike IA san efò nan liy pwodiksyon an epi ogmante pwodiktivite, diminye depans, epi diminye tan sik yo. Vizyon IA kapab tou li rezilta ki soti nan machin oswa ekipman tès epi pran desizyon ki apwopriye yo kòmsadwa.
Anplis amelyore pwosesis automatisation yo, yon kobot ki fonksyone ak IA ka swiv, analize epi entegre done pandan pwodiksyon pou anpeche domaj epi amelyore kalite pwodwi a. Amelyore automatisation faktori ou fasilman ak yon seri teknoloji IA konplè.
Robo kolaboratif nou yo ekipe ak yon sistèm vizyon entegre, ki bay kobot yo kapasite pou wè anviwònman yo, sa ki amelyore kapasite kobot yo anpil. Vizyon robo a, oubyen kapasite pou "wè" epi entèprete done vizyèl yo an envit kòmand, se youn nan karakteristik ki fè nou siperyè. Li chanje tout bagay pou fè travay avèk presizyon nan espas travay dinamik k ap chanje, sa ki fè operasyon yo mache pi byen, epi pwosesis automatisation yo pi efikas.
Li fèt ak moun ki fèk kòmanse itilize li, konesans pwogramasyon pa yon kondisyon esansyèl pou kòmanse ak AI Cobot. Yon mouvman entwisyon klike-epi-trennen lè l sèvi avèk lojisyèl pwogramasyon koule nou an diminye konpleksite a. Teknoloji patante nou an pèmèt operatè ki pa gen eksperyans nan kodaj pwograme yon pwojè ki jis senk minit.
Detèktè sekirite entegral yo ap sispann IA Cobot la lè yo detekte kontak fizik, sa ap minimize domaj potansyèl pou yon anviwònman san presyon epi an sekirite. Ou kapab tou mete limit vitès pou robo a pou li ka itilize nan plizyè anviwònman toupre travayè ou yo.
Pwodwi ki gen rapò



Espesifikasyon Paramèt
| Modèl | TM12 | |
| Pwa | 32.8KG | |
| Chaj Maksimòm | 12KG | |
| Rive | 1300mm | |
| Ranje jwenti yo | J1, J6 | ±270° |
| J2, J4, J5 | ±180° | |
| J3 | ±166° | |
| Vitès | J1, J2 | 120°/s |
| J3 | 180°/s | |
| J4 | 180°/s | |
| J5 | 180°/s | |
| J6 | 180°/s | |
| Vitès tipik | 1.3m/s | |
| Vitès Maksimòm | 4m/s | |
| Repetabilite | ± 0.1mm | |
| Degre libète | 6 jwenti wotasyon | |
| Antre/Sòti | Bwat kontwòl | Antre dijital: 16 Sòti dijital: 16 Antre analòg: 2 Sòti analòg: 1 |
| Zouti Koneksyon | Antre dijital: 4 Sòti dijital: 4 Antre analòg: 1 Sòti analòg: 0 | |
| Alimantasyon Antre/Sòti | 24V 2.0A pou bwat kontwòl la ak 24V 1.5A pou zouti a | |
| Klasifikasyon IP | IP54 (Bra robo); IP32 (Bwat kontwòl) | |
| Konsomasyon pouvwa | Tipik 300 wat | |
| Tanperati | Robo a ka travay nan yon seri tanperati ant 0 ak 50 ℃. | |
| Pwòpte | ISO Klas 3 | |
| Alimantasyon | 100-240 VAC, 50-60 Hz | |
| Entèfas Antre/Sòti | 3xCOM, 1xHDMI, 3xLAN, 4xUSB2.0, 2xUSB3.0 | |
| Kominikasyon | RS232, Ethemet, Modbus TCP/RTU (mèt ak esklav), PROFINET (Opsyonèl), EtherNet/IP (Opsyonèl) | |
| Anviwònman Pwogramasyon | TMflow, ki baze sou òganigram | |
| Sètifikasyon | CE, SEMI S2 (Opsyon) | |
| Entèlijans Atifisyèl ak Vizyon*(1) | ||
| Fonksyon IA | Klasifikasyon, Deteksyon objè, Segmantasyon, Deteksyon anomali, OCR pa entèlijans atifisyèl | |
| Aplikasyon | Pozisyonman, Lekti Kòd Bar 1D/2D, OCR, Deteksyon Defo, Mezi, Verifikasyon Asanblaj | |
| Presizyon Pozisyonman | Pozisyonman 2D: 0.1mm*(2) | |
| Je nan men (Enstore) | Kamera koulè otomatik ak rezolisyon 5M, distans travay 100mm ~ ∞ | |
| Je nan men (Si ou vle) | Sipòte maksimòm 2 kamera GigE 2D oubyen 1 kamera GigE 2D + 1 kamera 3D*(3) | |
| *(1)Pa gen bra robo vizyon entegre TM12X, TM14X, TM16X, TM20X ki disponib tou. *(2)Done ki nan tablo sa a mezire pa laboratwa TM epi distans travay la se 100mm. Li enpòtan pou note ke nan aplikasyon pratik, valè enpòtan yo ka diferan akòz faktè tankou sous limyè anbyen an sou plas la, karakteristik objè a, ak metòd pwogramasyon vizyon ki pral afekte chanjman nan presizyon. *(3)Gade sitwèb ofisyèl TM Plug & Play la pou modèl kamera ki konpatib ak TM Robot. | ||
Biznis nou an







