SERI CHANJMAN RAPID – QCA-S350 Yon Aparèy Chanjman Rapid nan Bout Yon Robo


Kategori Prensipal
Chanjè Zouti Robo / Chanjè Zouti Bout Bra (EOAT) / Sistèm Chanjman Rapid / Chanjè Zouti Otomatik / Entèfas Zouti Robotik / Kote Robo / Kote Grip / Fleksibilite Zouti / Degajman Rapid / Chanjè Zouti Pneumatik / Chanjè Zouti Elektrik / Chanjè Zouti Idwolik / Chanjè Zouti Presizyon / Mekanis Blokaj Sekirite / Efektè Bout / Otomatizasyon / Efikasite Chanjman Zouti / Echanj Zouti / Otomatizasyon Endistriyèl / Zouti Robotik Bout Bra / Konsepsyon Modilè
Aplikasyon
Zouti bout-d-bra (EOAT) yo lajman itilize nan endistri tankou fabrikasyon otomobil, elektwonik 3C, lojistik, bòdi piki, anbalaj manje ak famasetik, ak pwosesis metal. Fonksyon prensipal li yo enkli manyen pyès travay, soude, flite, enspeksyon, ak chanjman zouti rapid. EOAT amelyore efikasite pwodiksyon, fleksibilite, ak kalite pwodwi anpil, sa ki fè li yon pati esansyèl nan automatisation endistriyèl modèn.
Karakteristik
Gwo presizyon
Bò kote piston an ki ajiste grif la jwe wòl pozisyonman, sa ki bay yon gwo presizyon pozisyonman repetitif. Yon milyon tès sik montre ke presizyon reyèl la pi wo pase valè rekòmande a.
Segondè fòs
Piston bloke a ak yon gwo dyamèt silenn gen yon fòs bloke fò, aparèy rapid bout robo SCIC la gen yon kapasite anti-koupl fò. Lè w ap bloke, p ap gen okenn tranbleman akòz mouvman gwo vitès, kidonk evite echèk bloke epi asire presizyon pozisyonman repete.
Segondè pèfòmans
Mekanis bloke a ak yon konsepsyon sifas milti-konik, konpozan sele ki dire lontan ak yon sond kontak elastik kalite siperyè yo adopte pou asire yon kontak sere ant modil siyal la.



Espesifikasyon Paramèt
| Seri Chanjman Rapid | ||||
| Modèl | Chaj maksimòm | Presizyon repetabilite (X, Y ak Z) | Fòs bloke a 80Psi (5.5Bar) | Pwa pwodwi |
| QCA-S350 | 350kg | ±0.015mm | 31000N | 9.4kg |

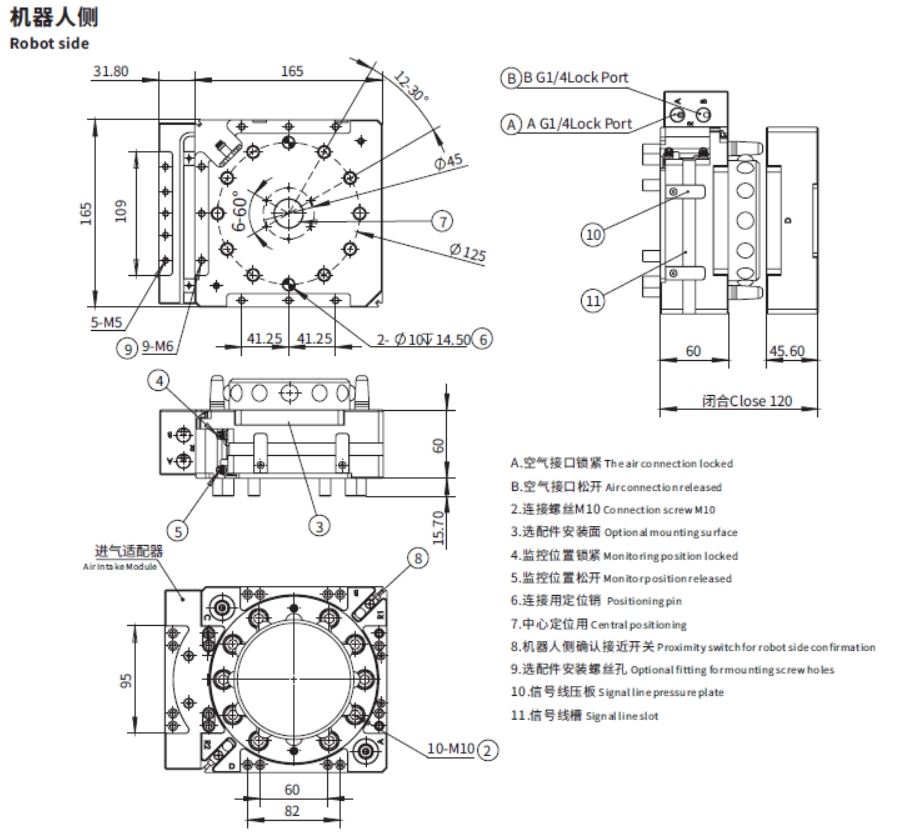
Bò robo a

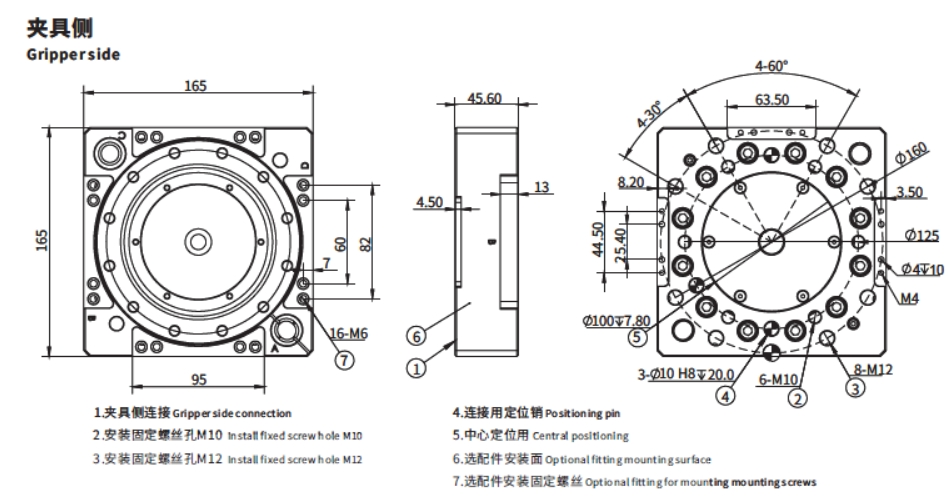
Bò priz la
Modil Aplikab
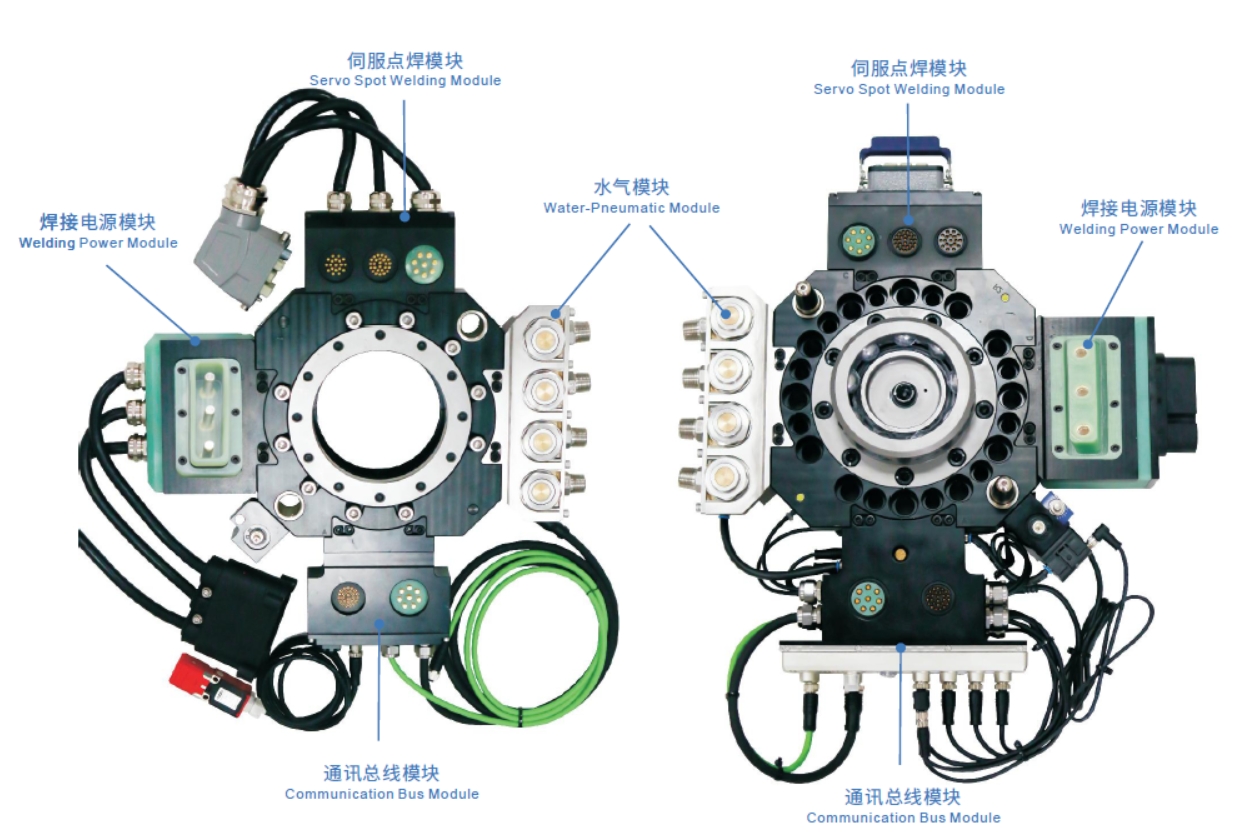
Modil pouvwa soude
| Non pwodwi | Modèl | PN |
| Modil pouvwa soude bò robo a | QCSM-03R | 7.Y02069 |
| Modil pouvwa soude bò grip la | QCSM-03G | 7.Y02070 |
Modil Ekstansyon Pneumatik
| Non pwodwi | Modèl | PN |
| Modil Ekstansyon Pneumatik oto-pwoklame bò kote robo a | QCAM-08G38R | 7.Y02051 |
| Modil Ekstansyon Pneumatik oto-pwoklame bò kote grip la | QCAM-08G38G | 7.Y02052 |
Modil Navigab
| Non pwodwi | Modèl | PN |
| Modil Waterway bò kote robo a | QCWM-04R1 | 7.Y02071 |
| Modil Waterway bò kote grip la | QCWM-04G1 | 7.Y02072 |
Biznis nou an







