SERI GRIPÈ ELEKTRIK HITBOT – Grip elektrik kolaboratif Z-EFG-R



Kategori Prensipal
Bra robo endistriyèl / Bra robo kolaboratif / Grip elektrik / Aktuatè entelijan / Solisyon automatisation
Aplikasyon
Prensipal robo seri SCIC Z-EFG yo piti epi yo gen yon sistèm servo entegre, ki pèmèt ou kontwole vitès, pozisyon ak fòs blokaj avèk presizyon. Sistèm priz dènye kri SCIC pou solisyon automatisation ap pèmèt ou louvri nouvo posiblite pou otomatize travay ou pa t janm panse posib.

Karakteristik

·Yon ti men pwisan priz elektrik ak motè sèrvo.
·Yo ka ranplase tèminal yo pou satisfè diferan egzijans pwojè a.
·Te kapab ranmase objè frajil ak deformab, tankou ze, tib tès, bag, elatriye.
·Apwopriye pou sèn san sous lè (tankou laboratwa ak lopital).
Sistèm Servo Entegre Aplike pou Divès Demann
Gwo fòs bloke
Fòs blokaj: 80N,
kou: 20mm
Kontwòl Presizyon
Repetabilite: ±0.02mm
Konekte epi jwe
Espesyalman fèt poupriz elektrik sis aks
Kontwolè a entegre
Ti zòn ki kouvri, pratik pou entegre.
Ke a ka chanje
Yo ka chanje ke li pou aplike pou divès demann.
Mou Klousaj
Li ka sere objè frajil yo

● Ankouraje yon revolisyon nan ranplasman priz pneumatik pa priz elektrik, premye priz elektrik ak sistèm sèrvo entegre nan peyi Lachin.
● Ranplasman pafè pou konpresè lè + filtè + valv solenoid + valv gaz + priz pneumatik
● Plizyè sik lavi sèvis, ki konsistan avèk silenn Japonè tradisyonèl la




Espesifikasyon Paramèt
Z-EFG-R a se yon priz elektrik robotik ak yon kontwolè entegre ak plizyè fonksyon an yon sèl. Li piti an gwosè, men li pwisan nan fonksyon.
● Yon ti men pwisan motè sèrvo elektrik gripper.
●Yo ka ranplase tèminal yo pou satisfè diferan egzijans pwojè a.
● Te kapab ranmase objè frajil ak defòmab, tankou ze, tib tès, bag, elatriye.
● Apwopriye pou sèn san sous lè (tankou laboratwa, ak lopital).
Z-EFG-R se yon ti priz elektrik ki gen yon sistèm servo entegre, li ka ranplase ponp + filtè + valè mayetik elektwon + valv papyon + priz lè.
| Modèl No. Z-EFG-R | Paramèt |
| Konjesyon serebral total | 20mm |
| Fòs priz | 80N |
| Repetabilite | ±0.02mm |
| Pwa priz rekòmande | 0.8kg |
| Mòd transmisyon | Etajè angrenaj + gid roulo kwaze |
| Ranplasman grès nan konpozan k ap deplase yo | Chak sis mwa oswa 1 milyon mouvman / lè |
| Tan mouvman yon sèl sans | 0.45s |
| Ranje tanperati fonksyònman | 5-55℃ |
| Ranje imidite fonksyònman | RH35-80 (Pa gen jèl) |
| Mòd mouvman | De dwèt deplase orizontalman |
| Kontwòl kou | Reglabl |
| Ajisteman fòs bloke | Reglabl |
| Pwa | 0.5kg |
| Dimansyon (L * W * H) | 68 * 68 * 132.7mm |
| Plasman kontwolè | Entegre |
| Pouvwa | 5W |
| Kalite motè | DC san bwòs |
| Vòltaj nominal | 24V |
| Kouran pik | 1A |
| Bra robo sis aks adaptab | UR, Aubo |
Kondwi ak Kontwolè yo entegre
Z-EFG-R se yon ti priz elektrik ki gen yon sistèm servo entegre, li ka ranplase ponp lè + filtè + valv mayetik elektwonik + valv papyon + priz lè.


Konpatib ak bra robo sis aks
Pend lan ka konpatib ak bra robo sis aks endikap la, pou reyalize ploge epi jwe, li gen yon kou 20mm longè, fòs blokaj la se 80N, kou li ak fòs blokaj li yo ka ajiste.
Ti Figi, Fleksib pou Enstale
Gwosè Z-EFG-R a se L68 * W68 * H132.7mm, estrikti li kontra enfòmèl ant, sipòte metòd milti-enstalasyon, kontwolè a entegre, li pran ti espas, li fasil pou aplike pou divès kalite travay blokaj.

Reyaji rapid, kontwòl presizyon
Tan mouvman ki pi kout pou yon sèl kou se 0.45s, repetabilite li se ±0.02mm, pati ke li ka chanje alèz, kliyan yo ka sere objè a selon demann lan.
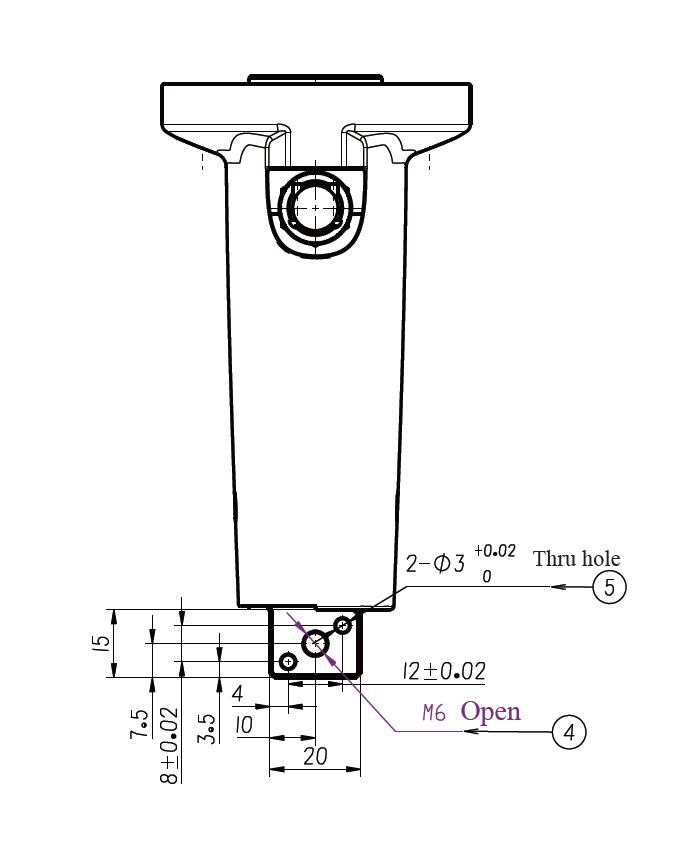
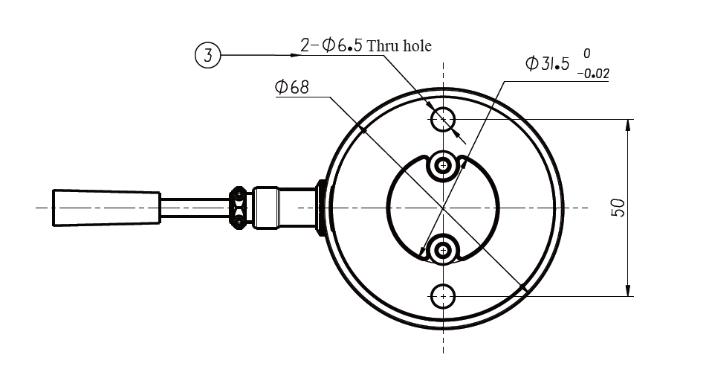
Dyagram Enstalasyon Dimansyon
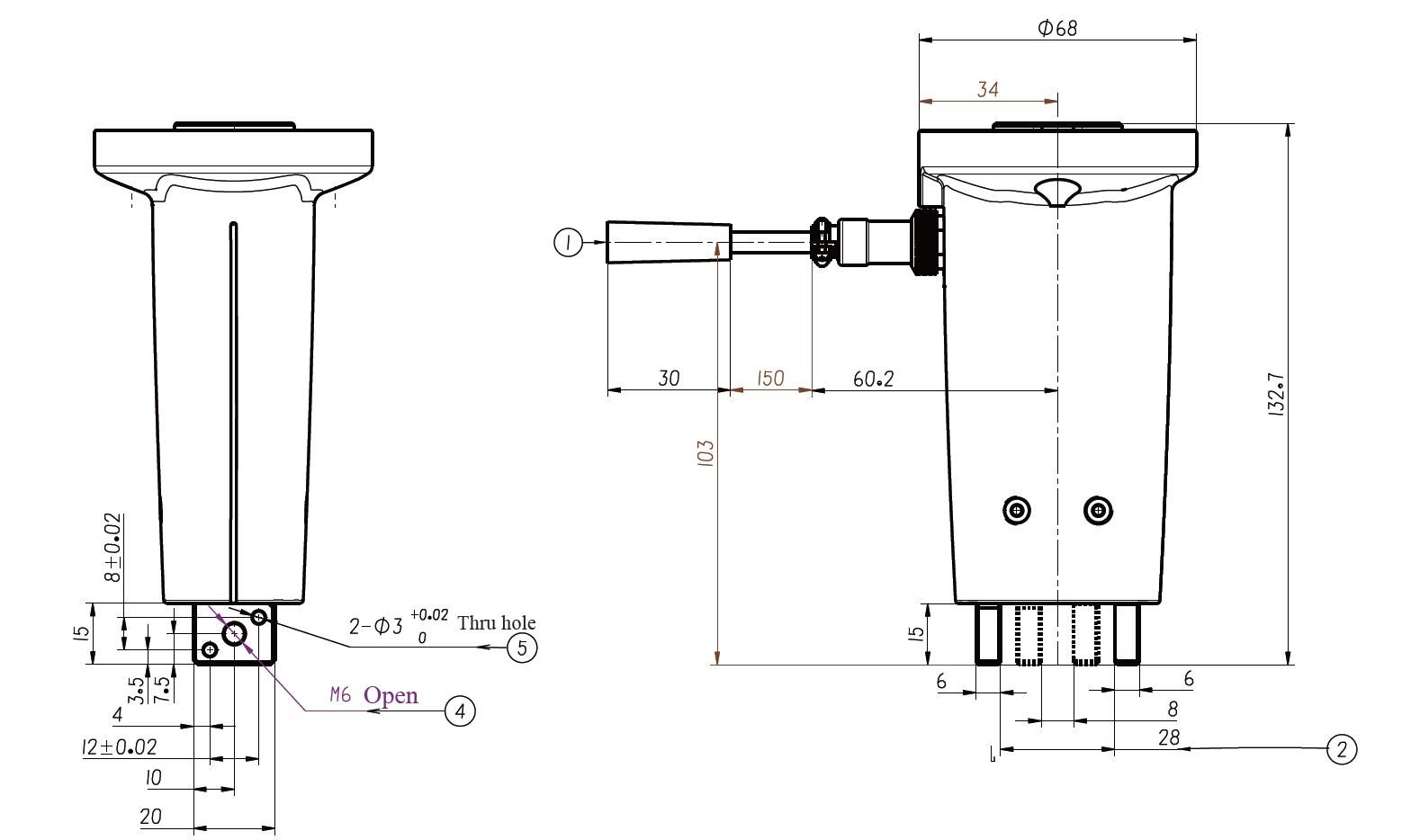
① RKMV8-354 Ploge aviyasyon senk nwayo pou RKMV8-354
② Kous gripè elektrik la se 20mm
③ Pozisyon enstalasyon an, sèvi ak de vis M6 pou konekte ak bride ki nan pwent bra robo UR la.
④ Pozisyon enstalasyon, pozisyon enstalasyon aparèy la (vis M6)
⑤ Pozisyon enstalasyon, pozisyon enstalasyon aparèy (3 twou peny silendrik)
Paramèt elektrik
Vòltaj nominal 24±2V
Kouran 0.4A

Biznis nou an







